针对您提出的为3-6V小电压马达设计调速电路的需求,使用晶体管或集成电路(IC)均能实现,且各有优势。下面将分别介绍两种方案,并提供详细的设计思路与电路图核心原理。
一、 使用晶体管的PWM调速方案
这是一种经典、成本低廉且易于实现的方案,核心是利用晶体管作为开关,通过脉冲宽度调制(PWM)控制马达的平均电压,从而实现无级调速。
1. 核心元件:
开关晶体管: 建议使用N沟道MOSFET,如IRFZ44N、IRF540N(注意Vgs阈值电压需在您的逻辑电平范围内),或大电流NPN三极管如TIP41C。MOSFET因驱动简单、效率高而更优。
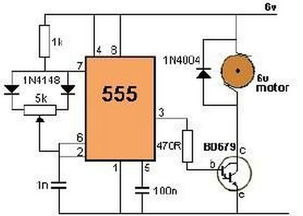
PWM信号发生器: 可使用最基础的555定时器集成电路构成无稳态多谐振荡器,产生频率固定、占空比可调的方波信号。
* 保护元件: 在马达两端反向并联一个续流二极管(如1N4007),用于泄放晶体管关断时马达线圈产生的反向感应电动势,保护晶体管。
2. 电路原理简述:
* 555 PWM发生器: 连接成经典的可调占空比方波发生电路。通过调节一个电位器,改变电容的充放电时间比例,从而输出占空比从0%到100%可调的PWM信号。
- 晶体管驱动级: PWM信号通过一个限流电阻(如220Ω)送至MOSFET的栅极(G极)或三极管的基极(B极)。当信号为高电平时,晶体管饱和导通,马达获得电源电压;当信号为低电平时,晶体管截止,马达断电。在一个快速开关周期内,马达得到的平均电压 = 电源电压 × 占空比。通过调节占空比,即可平滑调节马达转速。
3. 简易电路框图描述:`
[3-6V电源] ----+----[马达]----+----[MOSFET的D极]
| |
[续流二极管] [MOSFET的S极]---GND
(反向并联) |
|
[555 PWM输出]---[限流电阻]---[MOSFET的G极]`
二、 使用专用马达驱动IC方案
此方案集成度高,性能稳定,外围电路简单,通常内置保护功能,是更推荐的选择。
1. 推荐IC型号:
DRV8833: 一款双H桥电机驱动器,工作电压2.7V-10.8V,完美覆盖3-6V需求,单通道连续输出电流可达1.5A(峰值2A),足以驱动常见的小型马达。它可通过PWM输入直接进行调速控制,逻辑电平兼容3.3V/5V。
TB6612FNG: 另一款流行的双H桥驱动器,性能与DRV8833类似,同样支持PWM调速。
* L293D / L298N: 更经典的型号,但压降和功耗相对较大,对于低压系统效率稍低,但仍可使用。
2. 电路设计优势:
* 集成H桥: 无需外接复杂电路即可实现马达的正转、反转、刹车和停止控制,而晶体管单开关方案只能实现调速和启停(单向旋转)。
- 内置保护: 通常具备过流保护、过热关断等功能,安全性更好。
- 驱动简单: 仅需少数几个外围电容滤波,逻辑控制引脚直接连接单片机(如Arduino)或前述的555 PWM信号,即可实现精密控制。
3. 以DRV8833为例的典型应用连接:
* 电源(VM):连接3-6V马达电源。
- 逻辑电源(VCC):连接3.3V或5V为内部逻辑供电(若与单片机同电源)。
- 马达接口:连接在马达输出引脚(AOUT1, AOUT2)之间。
- 控制引脚:
- xIN1, xIN2:控制转向和模式(00-刹车/停止,01-正转,10-反转,11-刹车/停止)。
- xPWM: 接收外部PWM信号进行调速。
- 只需在电源引脚附近放置100nF和10uF的电容进行去耦滤波即可。
三、 设计与建议
- 方案选择:
- 如果追求极致的低成本、且只需单向调速,采用 555定时器 + MOSFET 的方案完全可行且足够。
- 如果需要正反转控制、更高的效率、更稳定的性能和更简便的布线,强烈推荐使用 DRV8833 这类专用马达驱动IC。其外围电路之简单,总体成本与晶体管方案相差无几,但体验和可靠性大幅提升。
- PWM频率建议: 对于小型直流马达,PWM频率建议在1kHz 到 20kHz 之间。频率太低(如几十Hz)会导致马达噪音大、振动明显;频率太高则可能因MOSFET开关损耗增加而降低效率。使用555电路时,可通过选择定时电阻电容将频率设定在5-10kHz左右。
- 注意事项:
- 电源滤波: 无论哪种方案,都应在电源入口处并联一个较大容量的电解电容(如100μF)和一个小的陶瓷电容(0.1μF),以平抑马达启停和PWM开关引起的电源波动。
- 散热: 如果马达工作电流较大(>500mA),请为晶体管或IC安装小型散热片。
- 地线布局: 功率地(马达电流回路)与信号地(555或控制芯片)应单点连接,以减少干扰。
希望以上详细的设计思路能帮助您成功构建小马达调速电路。专用IC方案在易用性和功能上是更优解,您可以根据最终需求选择合适的路径进行实现。